60G 连续 X 扫描误差分离与补偿
将 XY-FMCW 中连续运动 60G 实验的蛇形偏移、条纹来源与最终补偿链整理成可回看的工程文档
60G 连续 X 扫描误差分离与补偿
这一页把 XY-FMCW 里最近一轮 60G 连续 X 实验整理成站点文档。重点不是重复论文,而是把三个工程问题讲清楚:
- 为什么原始图会出现明显双峰和撕裂。
- 为什么做完蛇形补偿后仍然会残留条纹。
- 最终哪一套离线处理链在 5 组速度上最稳定。
这组实验回答了什么
连续 X 扫描的核心问题,最后被拆成了两类误差:
- 双向蛇形扫描带来的方向相关空间偏置。
- 有限二维孔径截断带来的相干旁瓣和条纹。
前者主要表现为目标在 X 方向被撕成左右两个峰;后者则表现为主峰附近沿 X/Y 方向残留细条纹。两类误差不能靠同一个补丁一起消失,所以需要分开识别、分开处理。
速度相关蛇形偏移
先对 5 组速度数据分别做 full / forward-only / reverse-only 重建,再比较正反向峰位差。结果非常稳定地说明:双峰不是目标本身有两个,而是正反向扫描各自形成单峰,但位置彼此错开。
| 速度 | 图像方向偏移 | 等效时延 | 原始双峰分离 | 补偿后分离 |
|---|---|---|---|---|
| 20 mm/s | 18 mm | 450.0 ms | 12 mm | 10 mm |
| 40 mm/s | 34 mm | 425.0 ms | 24 mm | 10 mm |
| 80 mm/s | 70 mm | 437.5 ms | 72 mm | 10 mm |
| 166.7 mm/s | 106 mm | 318.0 ms | 106 mm | 10 mm |
| 400 mm/s | 106 mm | 132.5 ms | 106 mm | 10 mm |
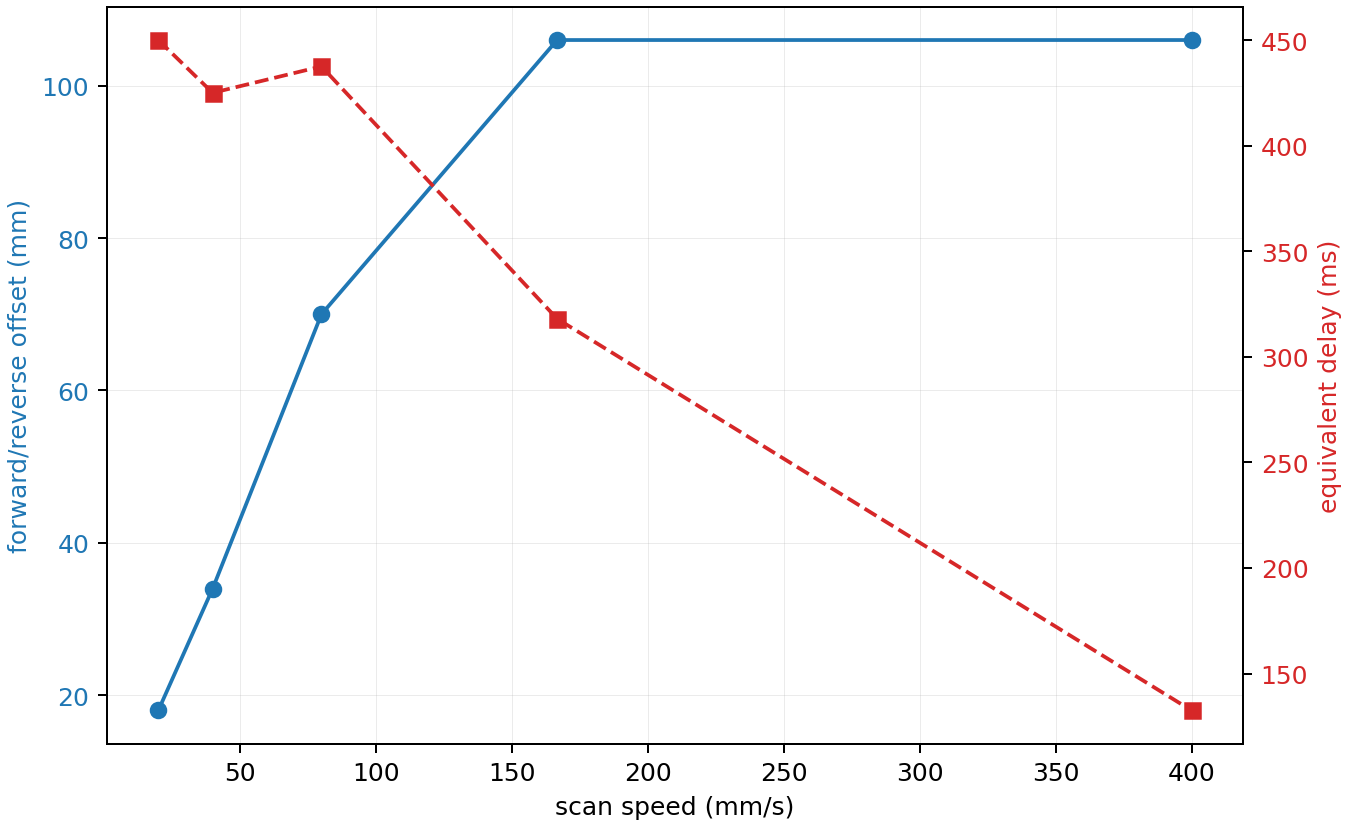
这张图最重要的结论不是“速度越高越差”这么简单,而是系统里存在若干相对稳定的方向偏置档位。一旦偏移量可测,就可以对所有反向行施加统一横向平移,把双峰重新并拢。
为什么补偿后还有条纹
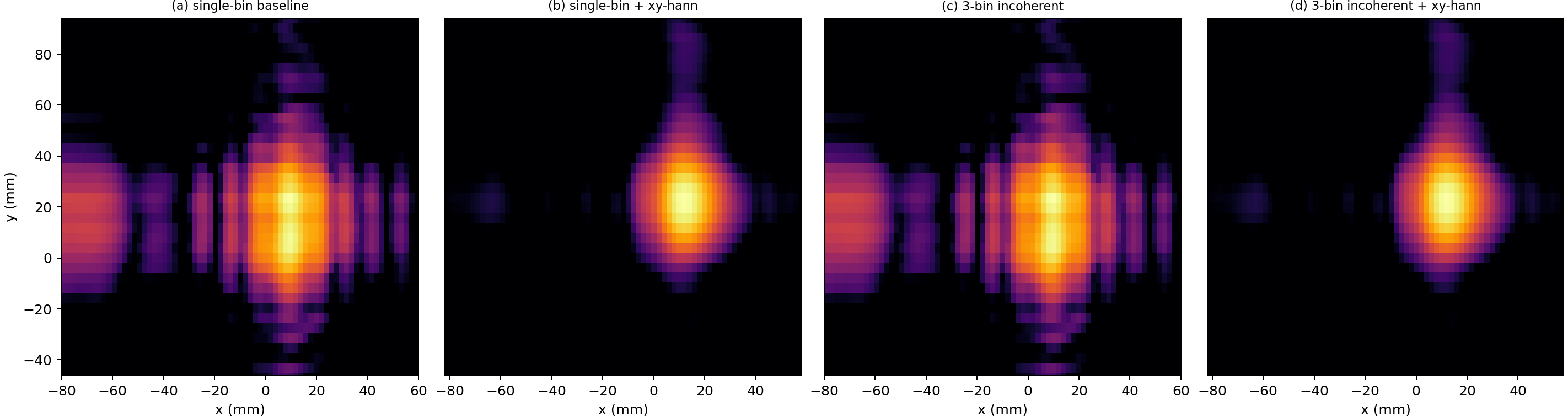
把 X 向蛇形误差拆掉之后,80 mm/s 的正向单方向数据仍然保留明显条纹。为此又单独做了两组控制实验:
- 只在重建前对 X/Y 孔径乘二维 Hann 窗。
- 只把单个 range bin 扩成相邻 3 个 bin 做非相干累加。
对应的量化结果如下:
| 方法 | range bins | Y 向最大旁瓣比 | 主瓣外能量占比 |
|---|---|---|---|
| 单 bin 基线 | 6 | 0.946 | 0.439 |
| 单 bin + X/Y 二维 Hann 窗 | 6 | 0.555 | 0.173 |
| 3 bin 非相干累加 | 5, 6, 7 | 0.939 | 0.441 |
| 3 bin 非相干累加 + X/Y 二维 Hann 窗 | 5, 6, 7 | 0.555 | 0.174 |
这里的判断很直接:多 bin 非相干累加几乎不改变条纹形态,而二维孔径加窗能同时压低 X/Y 方向条纹。因此残留条纹的主因不是 range gate 过窄,而是有限孔径带来的相干旁瓣。
80 mm/s 是怎么一步步修好的
80 mm/s 是最典型的坏图,所以把最终处理链拆成了四步可视化:
- 原始蛇形重建。
- 仅做方向补偿。
- 仅做 X/Y 二维 Hann 加窗。
- 方向补偿与二维加窗联合使用。
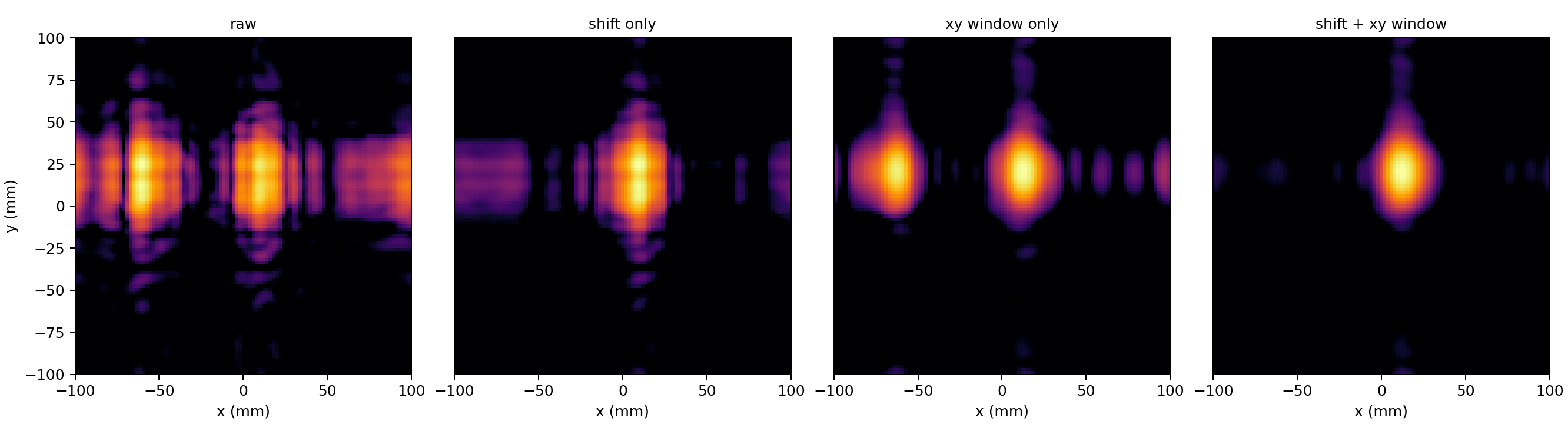
这张流程图说明两步各自负责的事情非常明确:
- 方向补偿负责消除 X 向双峰错位。
- 二维孔径加窗负责压低主峰周围的条纹和旁瓣。
少任何一步,图像都会只修好一半。
五组速度的最终结果
把同一套处理链统一应用到 20、40、80、166.7、400 mm/s 五组实验后,图像从原始的蛇形双峰/条纹状态,收敛到了单主峰且旁瓣受控的状态。
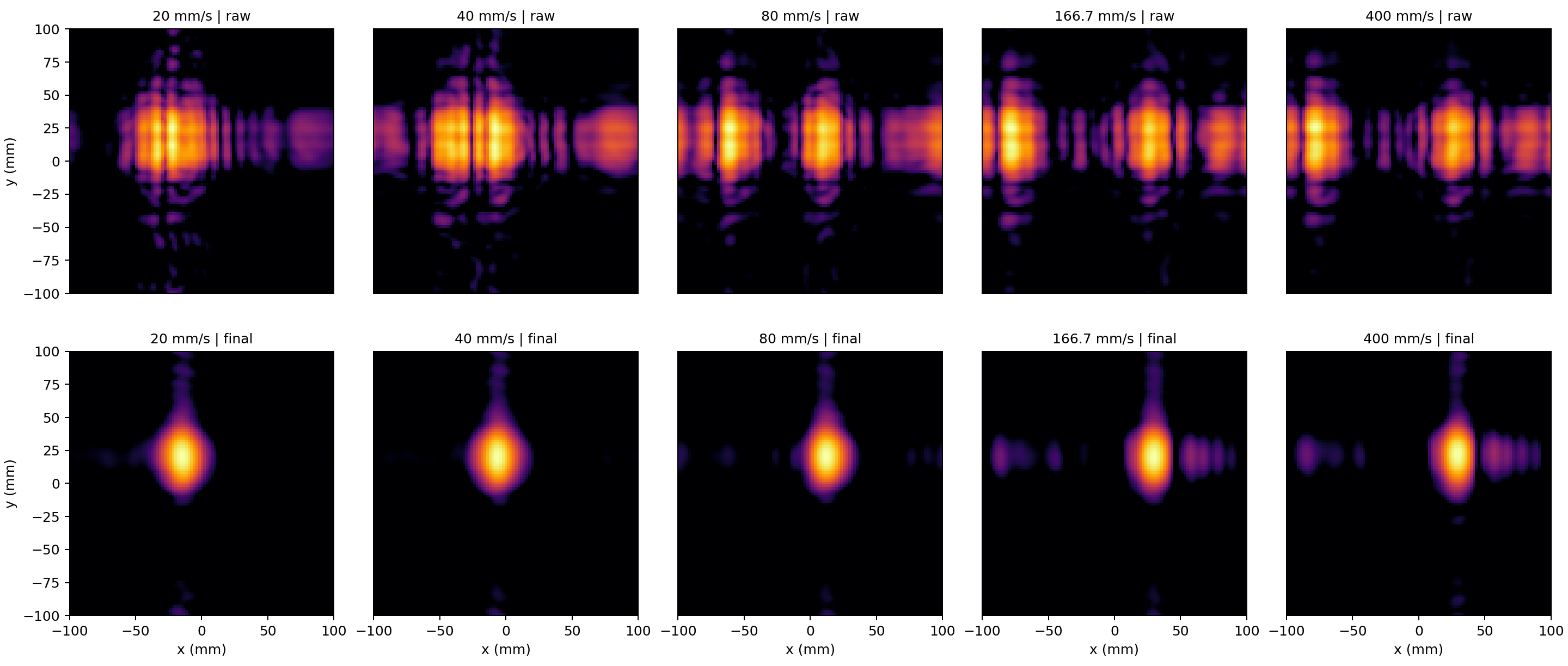
最终采用的离线处理链是:
- 先用正向/反向单方向重建测峰位偏移。
- 对全部反向扫描行施加统一横向补偿。
- 在单 bin 重建前对 X/Y 孔径乘二维 Hann 窗。
这套流程的价值在于它已经不是单张图的特例,而是在 5 组速度数据上都能复现的统一修正路径。
工程含义
对当前 XY-FMCW 的 60G 连续 X 路线,可以先得到三个非常实用的工程判断:
- 连续运动本身不是不能成像,主要问题出在双向蛇形拼接带来的方向偏置。
- 条纹问题和双峰问题不是同一类误差,后者要靠方向补偿,前者要靠孔径加窗。
- 在电机固件还没有稳定单向恒速采集前,离线方向补偿 + 二维加窗是当前最稳的结果恢复方案。