XY-FMCW 24G 工作流
24G 角反扫描链路、UI 能力与结果落盘方式
XY-FMCW 24G 工作流
24G 线的特点是链路简单、闭环快,适合拿来做平台联调、角反定位和参数试扫。
主要入口
- 24g/corner_reflector_scan_24g.py: CLI 入口,支持 scan、scan-image、image。
- 24g/corner_reflector_ui.py: 本地 Web UI,支持串口连接、回零、手动移动、扫描与实时预览。
- 24g/test_radar_485.py: 24G 原始串口链路测试。
- run24.sh: 24G 统一运行入口。
这条链路已经做了什么
- 扫描前估算网格、总耗时和预计完成时间。
- 实时更新 SAR 热力图、平均距离谱和当前点距离谱。
- 对实验结果做目录化落盘,自动生成 README、JSON 元数据、PNG 预览和日志。
- 强制 1024 个复数采样点,避免 UI 与固件协议脱节。
典型实验结果
下面这组结果来自 24G UI 扫描实验目录 ui_scan_20260411_170309,扫描范围为 250 mm × 250 mm,步进 2.5 mm,共 10201 点。
24G 静态角反基线
先看静态角反距离谱。这张图的价值不是展示最终成像,而是确认 24G 链路在单目标条件下的距离响应大致落在预期 bin 附近,适合做串口、采样点数和去直流处理的第一道基线。
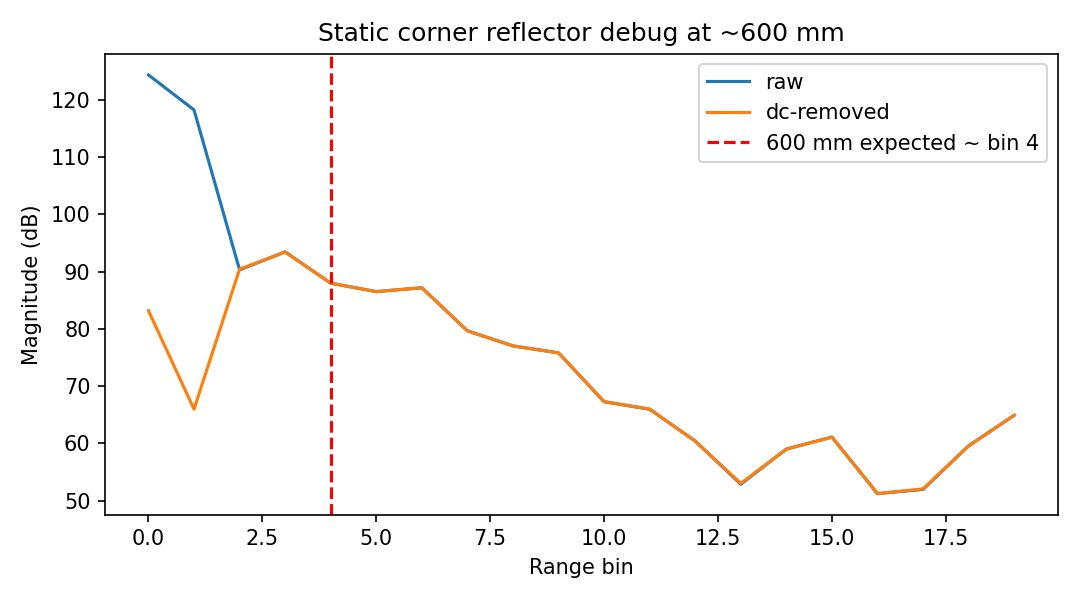
这组三张图合在一起,分别回答三个不同问题:
- 静态角反距离谱:单点目标有没有出现在合理距离附近。
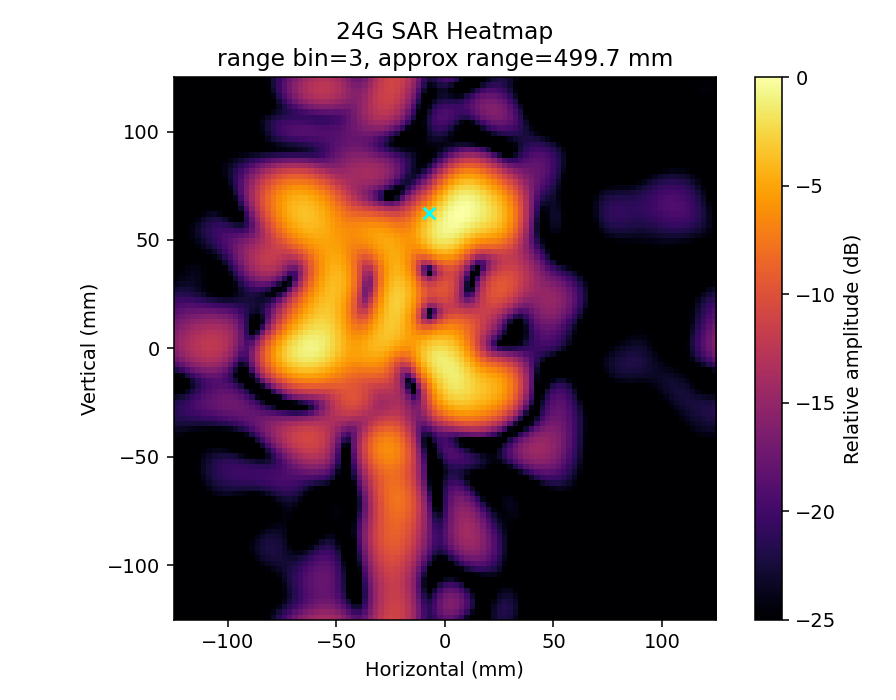
- UI 扫描热力图:二维扫描和聚焦是否已经形成可读空间分布。
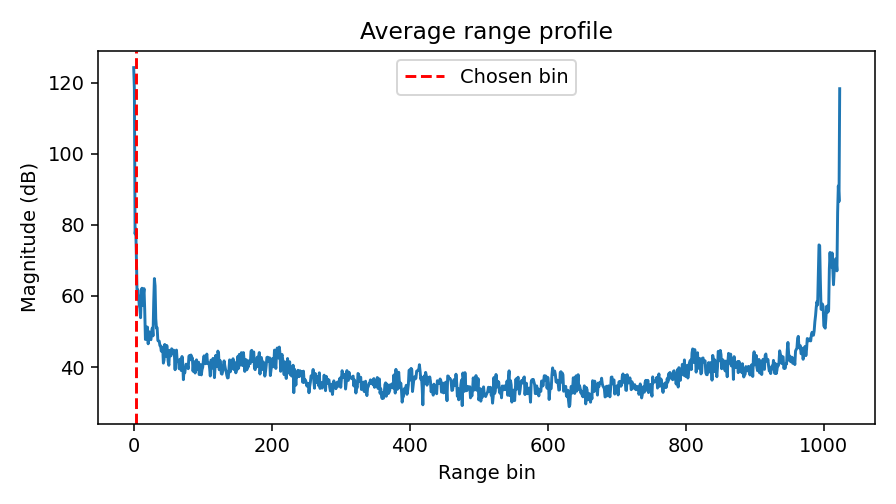
- 平均距离谱:整次实验在选定 range bin 上是否具备稳定主峰。
适用场景
- 角反目标定位。
- 运动平台回零/绝对位置逻辑验证。
- 近场二维成像参数预扫。
当前边界
- 距离分辨率受 900 MHz 带宽限制,厚目标或复杂多层目标不适合直接做精细层析。
- 整条链路依赖平台回零和宿主位置状态一致,中途掉电/复位会直接破坏扫描连续性。
- 热力图已经能反映目标区域能量聚集,但仍可见明显旁瓣和拖尾,说明当前 24G 结果更适合作为定位与参数预扫基线,而不是高保真轮廓恢复。