XY-FMCW 60G 工作流
IWR6843 60G 自检、TCP IQ 接收、扫描 UI 与连续 X 规划说明
XY-FMCW 60G 工作流
60G 线基于 IWR6843,和 24G 最大的区别是数据不再靠单串口一帧一帧拉取,而是通过 CLI 串口下发配置,通过 TCP 接收原始 IQ。
主要入口
- 60g/radar_cli.py: 负责发送 cfg、sensorStart、sensorStop。
- 60g/radar_tcp.py: 负责 TCP 接收与 LVDS IQ 解帧。
- 60g/radar_self_test_60g.py: 生成 60G 自检报告。
- 60g/corner_reflector_ui_60g.py: 60G Web UI。
- run60.sh: 60G 统一运行入口。
已验证的部分
- 自动识别 CLI 串口。
- TCP 桥接接入与完整 IQ 帧接收。
- 自检报告生成,包括 README、JSON、预览图和日志。
- 逐点扫描模式下的成像主链路。
典型结果
下图来自已验证的 60G self-test 结果目录,说明 TCP IQ 接收和配置链路已经跑通。
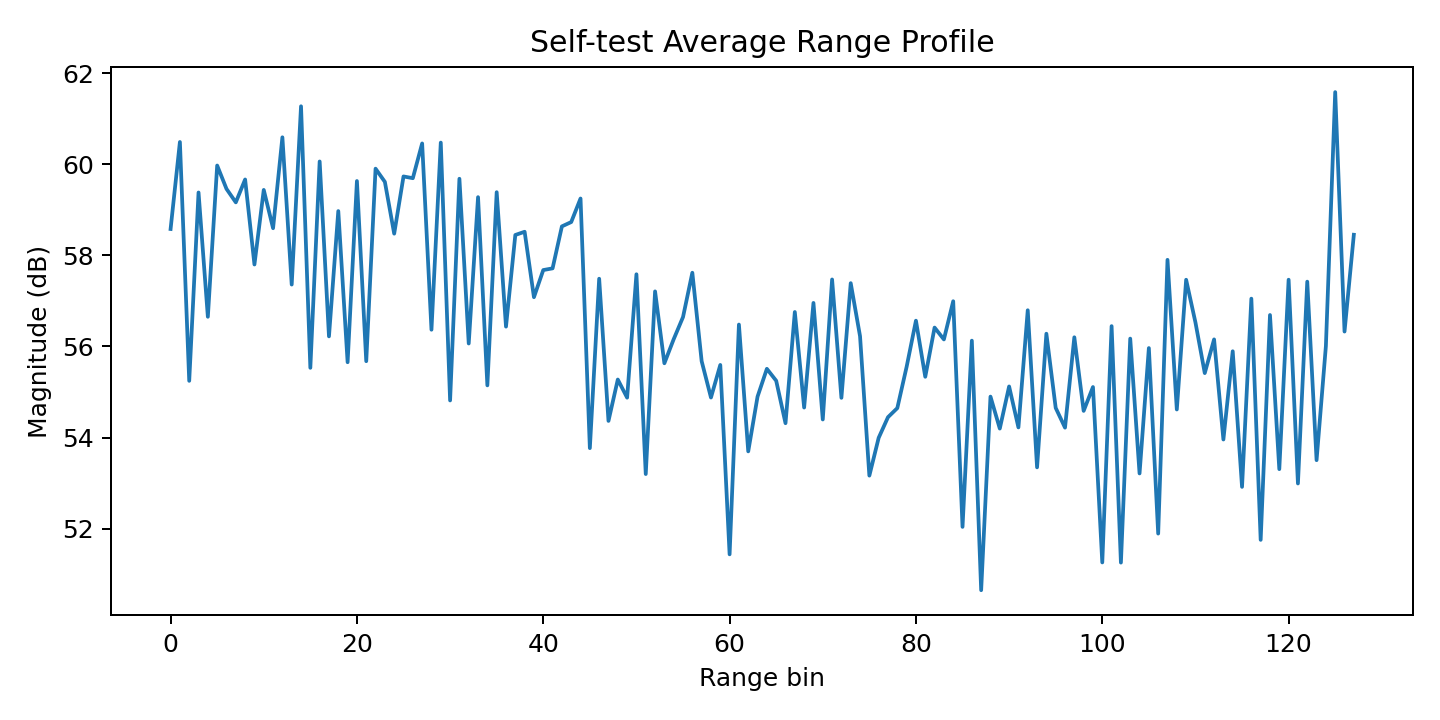
这张图最有价值的地方,不是峰值有多漂亮,而是它对应的整套自检报告同时给出了 3/3 帧接收成功、0 次超时、约 0.20 s 建链时间。它适合作为每次改网口、改 cfg、改桥接方式之后的第一道健康检查。
下面这张单帧快测图来自 chain quicktest。它的作用不是替代完整 self-test,而是提供一个更快的 smoke test,用来判断 CLI、TCP 和数据流最基本的闭环是否还活着。

连续 X 规划现状
continuous_x.py 与 60g-continous 下的模板已经能估算以下指标:
- 原始帧率与有效 slow-time。
- 连续线速度与 slow-time 位移间距。
- 单行扫描时间和整次扫描总时长。
但这部分目前还是规划模式,不是正式执行模式。根因很直接:电机侧还没有恒速流式运动命令,现有固件只适合点到点停走。
推荐使用方式
- 先跑 self-test,确认 CLI + TCP + 网线都通。
- 再用 UI 做小范围逐点扫描。
- 等电机固件支持连续运动后,再尝试 continuous X 真扫描。
怎么理解这些图
- Self-test 图用于判断完整链路稳定性,是发布前和换设备后的主基线。
- Quicktest 图用于判断最小采集闭环是否仍能出图,适合快速排障。
- 真正的 60G 成像质量判断,仍然要等逐点扫描结果和后续连续 X 实验补齐。